
Особенности выбора камер видеонаблюдения для систем цифровой аналитики

Современные инструменты видеоаналитики успешно задействуются в самых разнообразных сферах, начиная созданием высокоэффективных систем контроля доступа и заканчивая оптимизацией бизнес-процессов.
Современные инструменты видеоаналитики успешно задействуются в самых разнообразных сферах, начиная созданием высокоэффективных систем контроля доступа и заканчивая оптимизацией бизнес-процессов. Несмотря на все многообразие программных комплексов данного класса, на базовом уровне каждый из них должен уметь решать три основные задачи:
- обнаружение — определение факта появления объекта в зоне интереса;
- распознавание — определение типа наблюдаемого объекта (транспортное средство,человек);
- идентификация — сравнение свойств объекта с имеющимся образцом для установления их соответствия (машина клиента, сотрудник компании).
Для примера рассмотрим СКУД на охраняемой территории. В зоне интереса (КПП) был обнаружен движущийся объект, после чего интеллектуальный алгоритм определяет его тип. Если в кадре появился человек, а не, например, бездомный кот, осуществляется идентификация: черты лица сличаются с имеющейся базой данных. В процессе сверки выяснилось, что перед нами сотрудник компании, имеющий соответствующий уровень допуска. На контроллер электромагнитного замка подается сигнал и ворота открываются, а событие фиксируется в журнале.
Точность функционирования подобной системы зависит отнюдь не только от того, насколько совершенные алгоритмы она использует, но и, в первую очередь, от правильного выбора камер видеонаблюдения с учетом их технических характеристик и особенностей охраняемого объекта. Актуальным стандартам идентификации и распознавания посвящена наша сегодняшняя статья.
Характеристики объективов для камер видеонаблюдения
Первое, на что необходимо обратить внимание — фокусное расстояние объектива (f), которое напрямую влияет на угол обзора видеокамеры, причем зависимость между этими величинами обратно пропорциональна: чем меньше фокусное расстояние, тем больше угол обзора (объекты сцены при этом оказываются визуально дальше), и наоборот.
| Фокусное расстояние, (мм) | Угол обзора, (°) | Оптимальная дистанция до объекта, (м) |
|---|---|---|
| 2.8 | 86 | 0–5 |
| 3.6 | 72 | 0–6 |
| 6 | 48 | 5–10 |
| 8 | 30 | 10–20 |
| 12 | 25 | 25–35 |
| 16 | 17 | 35–50 |
В камерах видеонаблюдения с вариофокальным объективом фокусное расстояние изменяется в широких пределах. Для расчета угла обзора при различных значениях f можно воспользоваться следующей формулой:
α = 2arctg(d/2f)
В приведенном выражении:
- α — угол обзора камеры (в градусах);
- d — горизонтальный или вертикальный размер светочувствительного сенсора (в мм);
- f — фокусное расстояние объектива (в мм).
Следует помнить, что здесь не учитывается явление сферической аберрации, особенно ярко выраженной у короткофокусных (f < 28 мм) объективов. Термин обозначает погрешность получаемого изображения, вызванную несовпадением фокусов лучей света, проходящих через собирающую линзу на разных расстояниях от оптической оси, из-за чего периферические участки кадра искажаются и реальный угол обзора оказывается меньше расчетного. Данное явление получило название дисторсии. Ее вычисление является достаточно сложной процедурой: как правило, калибровка камеры осуществляется эмпирически во время монтажа, при этом целевые показатели искажений лежат в пределах 5–10%.
Переменная «d» требует дополнительных пояснений. В технических спецификациях камер видеонаблюдения запись вида «⅓ дюйма» указывает на диагональ светочувствительной матрицы, ширина и высота которой могут иметь соотношение 4:3 или 16:9. Как следствие, размеры двух матриц разных форматов с идентичной диагональю будут отличаться.
| Диагональ матрицы | Формат | ||||
|---|---|---|---|---|---|
| 4:3 | 16:9 | ||||
| дюймы | мм | Ширина, мм | Высота, мм | Ширина, мм | Высота, мм |
| 1/4 | 4.23 | 3.39 | 2.54 | 3.69 | 2.08 |
| 1/3 | 5.64 | 4.52 | 3.39 | 4.92 | 2.77 |
| 1/2.8 | 6.05 | 4.84 | 3.63 | 5.27 | 2.96 |
| 1/2.7 | 6.27 | 5.02 | 3.76 | 5.47 | 3.07 |
| 1/2.5 | 6.77 | 5.42 | 4.06 | 5.9 | 3.32 |
| 1/2 | 8.47 | 6.77 | 5.08 | 7.38 | 4.15 |
Поскольку, как мы выяснили, фокусное расстояние объектива определяет не только горизонтальный угол обзора, но и оптимальную дальность, опираясь на данный параметр можно приблизительно определить дистанции обнаружения, распознавания и идентификации для конкретной модели видеокамеры.
| Фокусное расстояние, (мм) | Дистанция обнаружения, (м) | Дистанция распознавания, (м) | Дистанция идентификации, (м) |
|---|---|---|---|
| 2.8 | 23.33 | 4.66 | 1.86 |
| 3.3 | 27.5 | 5.5 | 2.2 |
| 3.6 | 30 | 6 | 2.4 |
| 4.2 | 35 | 7 | 2.8 |
| 6 | 50 | 10 | 4 |
| 8 | 66.66 | 13.33 | 5.33 |
| 9 | 75 | 15 | 6 |
| 12 | 100 | 20 | 8 |
| 22 | 183.33 | 36.66 | 14.66 |
| 50 | 416.67 | 83.33 | 33.33 |
Давайте потренируемся использовать полученные знания на практике. Предположим, расчетная дистанция обнаружения должна составлять 100 метров, распознавания — 20 метров, а идентификации лиц — от 2 до 8 метров. Сверившись с таблицей, выясняем, что для наших нужд вполне подходит уличная IP-камера IPEYE HB1-R-2.8-12-02 с вариофокальным объективом 2.8-12 мм.
##P_40988##Данная модель получила светочувствительный сенсор размером ⅓ дюйма и поддерживает видеозапись в максимальном разрешении 1280 x 720 пикселей, что соответствует формату 16:9. Воспользуемся формулой α = 2arctg(d/2f), чтобы определить горизонтальный угол обзора видеокамеры:
- при фокусном расстоянии 2.8 мм горизонтальный угол обзора составит α = 2arctg(4.92/2*2.8)=82.6°;
- при фокусном расстоянии 12 мм горизонтальный угол обзора составит α = 2arctg(4.92/2*12)=23.2°.
Теперь мы располагаем всеми необходимыми сведениями для того, чтобы подобрать оптимальную точку монтажа для обеспечения безупречной работы системы видеоаналитики.
Выбор камеры видеонаблюдения с учетом разрешения светочувствительной матрицы
Фокусное расстояние является весьма важным, но отнюдь не единственным параметром, определяющим соответствие камеры заданным эксплуатационным требованиям: способность к формированию картинки, качества которой будет достаточно для распознавания и идентификации объектов во многом зависит от ее разрешения. В силу отсутствия единых отраслевых стандартов на момент появления первых систем распознавания лиц, инсталляторы стали ориентироваться на данные научно-исследовательского отдела МВД Великобритании для видео формата 4CIF (704x576 пикселей).
| Задача | Вертикальный размер изображения человека (в % от высоты кадра) | Линейное разрешение (в пикселях/м) |
|---|---|---|
| Обнаружение | 10 | 20 |
| Распознавание | 50 | 100 |
| Идентификация | 100–150 | 250 |
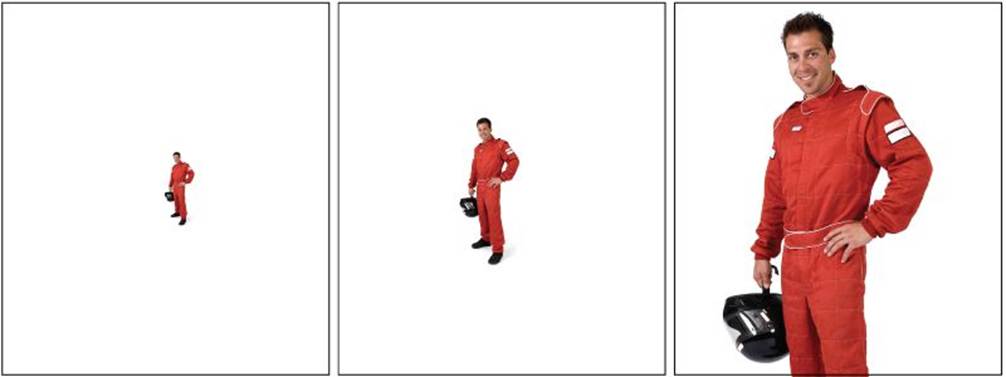
Для наглядности рассмотрим конкретный пример. На картинке ниже один и тот же человек снят так, что его изображение занимает 20%, 40% и 140% от высоты кадра. В первом случае система видеоаналитики сможет обнаружить движущийся объект, во втором — однозначно распознать в нем человека, а в третьем — провести идентификацию по лицу.
Аналогичные пропорции были рассчитаны и для других распространенных аналоговых форматов.
| Задача | WSVGA | SVGA | VGA | PAL | 2CIF | CIF | QCIF |
|---|---|---|---|---|---|---|---|
| Обнаружение | 7 | 9 | 10 | 14 | 25 | ||
| Распознавание | 34 | 42 | 50 | 70 | 139 | ||
| Идентификация | 67 | 84 | 100 | 139 | |||
Когда речь заходит о выборе цифровых камер видеонаблюдения, перечисленные выше соотношения становятся неактуальны. Применительно к современным устройствам принято ориентироваться на количество пикселей, участвующих в формировании объекта, подлежащего идентификации. Такой подход более логичен, так как, например, ширина человеческого лица в среднем составляет около 16 сантиметров, тогда как рост и комплекция у разных индивидов могут в значительной степени отличаться.
Что же касается действующих нормативов, то здесь все не так однозначно. Практика показала, что следование рекомендациям, предложенным Европейским комитетом электротехнической стандартизации (CENELEC) отнюдь не всегда оправдано. Большинство профессиональных проектировщиков опираются на данные Национальной лаборатории судебной экспертизы Швеции которые, кстати, практически полностью совпадают с результатами собственных исследований инженеров HikVision.
| Задача | Минимальное кол-во пикселей на ширину лица | Кол-во пикселей на сантиметр | Кол-во пикселей на дюйм |
|---|---|---|---|
| Обнаружение | 4 | 0.25 | 0.6 |
| Распознавание | 20 | 1.25 | 3.2 |
| Идентификация в благоприятных условиях | 40 | 2.5 | 6.3 |
| Идентификация в неблагоприятных условиях | 80 | 5 | 12.5 |
Что же касается автомобильных номеров, то для их успешной идентификации вертикальный размер цифр и букв должен составлять не менее 15 пикселей.
Актуальность приведенных параметров хорошо заметна на следующей иллюстрации.

Ключевым преимуществом шведской классификации является разделение условий наблюдения на две категории (чего, к сожалению, нет в документах CENELEC):
- сложные — уровень освещения недостаточен или значительно меняется в короткий промежуток времени, наблюдаемые объекты передвигаются с большой скоростью, либо видны под углом, в результате часть деталей оказывается вне поля зрения камеры;
- благоприятные — наблюдаемые объекты передвигаются с умеренной скоростью, мелкие детали, необходимые для распознавания, хорошо видны в кадре, освещение достаточное для получения качественной картинки.
Таким образом, зная фокусное расстояние и разрешающую способность камеры видеонаблюдения, можно выбрать модель, способную осуществлять распознавание и идентификацию объектов на заданной дистанции. Ниже приведены данные для наиболее распространенных в настоящее время разрешений.
| Разрешение по горизонтали, (пикс.) | Фокусное расстояние, (мм) | Оптимальная дальность, (м) | Максимальная ширина сцены, (м) |
|---|---|---|---|
| 1280 | 3.3–12 | 6 | 2.6 |
| 2592 | 2.8–8 | 9 | 5.2 |
| 1920 | 5.1–51 | 41 | 3.8 |
| 736 | 3.3–119 | 50 | 1.5 |
| 1280 | 4.4–132 | 67 | 2.6 |
Для примера рассмотрим цифровую видеокамеру HikVision DS-2DE4225W-DE. Устройство предназначено для наружного монтажа и оснащено вариофокальным объективом с фокусным расстоянием от 5 до 50 мм, а 2-мегапиксельная матрица позволяет вести съемку в разрешении Full HD (1920 x 1080 пикселей).
##P_42552##Используя приведенную выше таблицу, выясняем, что данная модель способна обеспечить качество картинки, достаточное для распознавания человеческого лица на дистанции вплоть до 40 метров, при этом максимальная ширина сцены будет составлять 3.8 метров.
Роль освещения в распознавании и идентификации
Настало время поговорить о таком факторе, как уровень освещенности. Здесь все достаточно очевидно: чем хуже подсветка, тем сложнее различить символы или мелкие черты лица человека, попавшего в кадр. Давайте сравним изображения, полученные идентичным оборудованием, но при разном освещении.

A. кадр сделан при интенсивности светового потока в 1600 люкс, лицо человека хорошо освещено;
B. хотя фронтальный источник света освещает лицо с силой в 350 люкс, фоновая засветка имеет значительно большую интенсивность, в результате чего идентификация становится невозможной (фотографы называют данную ситуацию «контражур»);
C. фронтальная подсветка в 7 люкс при условии отсутствия контрового света обеспечивает приемлемое качество изображения, достаточное для идентификации;
D. при освещенности 1.5 люкса идентификация осложняется из-за паразитных шумов.
Для повышения качества картинки в сложных условиях освещения современные камеры видеонаблюдения используют объективы с широкодиапазонным антибликовым покрытием, позволяющим улучшить светопропускную способность оптики, а также задействуют продвинутые алгоритмы обработки изображения, в числе которых необходимо выделить:
- BLC (компенсация задней засветки) — нивелирует влияние контражура за счет увеличения времени экспозиции, однако задний план при этом значительно теряет четкость;
- HLC (компенсация яркой засветки) — при обнаружении источника слишком яркого света создается дополнительный кадр, в котором данные из соответствующей области игнорируются (актуально для идентификации автомобильных номеров в темное время суток);
- WDR (широкий динамический диапазон) — функция корректировки яркости и контраста сцены путем программного объединения кадров, сделанных с разной экспозицией;
- DNR (цифровое подавление паразитных шумов) — анализирует изображение и «исправляет» искаженные пиксели, помогая устранить графические артефакты, возникающие в условиях низкого освещения,.
Большинство современных цифровых камер видеонаблюдения поддерживает одновременно несколько технологий улучшения изображения. Например, уличная модель HikVision DS-2DE4225W-DE способна похвастаться аппаратным WDR 120 дБ, BLC и 3D DNR, использующим, помимо традиционного сравнения соседних кадров в последовательности алгоритмы пространственного шумоподавления и отслеживание изменений пикселей, формирующих изображение движущихся объектов, что позволяет достичь действительно впечатляющих результатов.
 3D DNR OFF
3D DNR OFF
 3D DNR ON
3D DNR ON
Однако при всех преимуществах перечисленных методов делать ставку исключительно на современные технологии, как минимум, опрометчиво: хотя они и способны стать отличным подспорьем, при проектировании системы видеонаблюдения следует постараться достичь оптимальных условий освещения. Во-первых, даже самые совершенные фильтры имеют побочные эффекты: например, DNR «замыливает» кадр, что затрудняет распознавание удаленных объектов.

Во-вторых, надо учитывать, что такой параметр, как глубина резкости, зависит не только от фокусного расстояния, но и от уровня освещенности: данный показатель возрастает при уменьшении апертуры диафрагмы объектива камеры видеонаблюдения.

Наиболее благоприятные условия для работы систем видеоаналитики обеспечивает равномерное фронтальное освещение от 150 люкс (достаточно для идентификации номеров транспортных средств) до 300–500 люкс (для идентификации лиц).
Теоретические расчеты позволяют с достаточно высокой точностью подобрать наиболее подходящую камеру с учетом технических характеристик самого устройства и специфики охраняемого объекта. Тем не менее на все 100% предсказать, насколько эффективной окажется спроектированная система практически невозможно, поэтому инсталляторы используют в своей работе различные методы тестирования видеонаблюдения на предмет соответствия заданным требованиям. О наиболее эффективных из них мы расскажем в одной из следующих публикаций.